Rotary Motors em Arduino O que são, para que servem e quais são os melhores que podemos usar em um projeto?

Arduino é hoje considerado o uma das melhores plataformas de criação eletrônica de código aberto o mundo. Que, oferece software e hardware livres, oferece grande poder, é versátil e revela notável facilidade de uso. É, portanto, um dos elementos mais fundamentais para o desenvolvimento de projetos baseados na cultura DIY e no ambiente maker .
Desta forma, esta plataforma permite criadores e desenvolvedores, bem como amadores de crie qualquer projeto , qualquer que seja o seu nível de dificuldade e, portanto, oferece uma operação ideal com o objetivo de fazer melhor uso da tecnologia e da Internet das coisas . Portanto, sua expansão é desproporcional.
Agora, felizmente, o placas arduino suportam uma miríade de plug-ins com os quais é possível construir os vários projetos desejados . Razão pela qual eles permitir o uso de motores rotativos ou rotativos para programá-los do zero. É por isso que, a seguir, mostramos a você em quais são esses elementos e como usá-los em conjunto com o Arduino .
O que é um motor rotativo e para que tipo de projeto Arduino ele é usado?
Se verdadeiro, o motor rotativo é considerado o um dos primeiros tipos de motores de combustão interna que existiram . Portanto, foi amplamente utilizado antes da Primeira Guerra Mundial, nos primeiros carros e motocicletas, bem como para propulsionar aviões. Considerando que, em geral, eles se distinguem por trabalhar com um virabrequim que permanece fixo e, portanto, o motor gira em torno dele .
Basicamente, no entanto, um motor rotativo consiste em um motor de combustão interna que é capaz de realizar os quatro tempos de sucção, compressão, expansão e exaustão , enquanto a câmara de trabalho muda seu volume e as partes móveis giram na mesma direção.
Então, em essência, ele funciona como um motor de ciclo Otto que, em vez de ter um bloco de cilindros com virabrequim giratório, permanece fixo e todo o bloco do cilindro é o que gira em torno dele . Por sua vez, em projetos Arduino, motores rotativos têm usos diferentes que, em particular, se dedicam ao domínio da domótica para automatizar uma casa, como no mundo da electrónica.
Bem, geralmente esses motores estão presentes em qualquer parte de uma casa , pois são essenciais para o funcionamento de ventiladores, aparelhos elétricos, computadores pessoais, barbeadores elétricos, carros de controle remoto, etc. Eles podem até ser usados para criar grandes projetos onde a energia elétrica é o protagonista .
O que devo ter em mente ao programar usando motores rotativos no Arduino?

Felizmente, o O uso de motores rotativos no Arduino revela benefícios notáveis que os usuários devem conhecer. Portanto, mencionamos aqui o mais importante deles: seus componentes são equilibrados internamente com contrapesos rotativos que promovem uma distribuição de força mais uniforme e não geram muita vibração.
Além disso, ele tem menos peças móveis do que um motor convencional e seu peso total é, portanto, muito mais ideal. Por sua vez, para compilar um motor rotativo no Arduino, é essencial levar em consideração vários aspectos .
Um deles inclui os tipos que podem ser usados em um projeto com placas Arduino e, portanto, vale a pena detalhá-los da seguinte forma:
- Motores DC : Eles também são chamados de "motores DC" e são um dos atuadores mais comuns de todos. Aquele trabalho com base no alinhamento de dois campos magnéticos e sua principal vantagem é garantir uma sincronização eficiente em qualquer velocidade.
- Motores sem escova : Eles denotam uma variante dos motores DC que difere das escovas como um sistema de retificação de corrente. Portanto, eles são vire para a eletronica para ser capaz de mudar o campo magnético. Assim, eles são amplamente utilizados em ventiladores, hélices de navios, quadricópteros e outros veículos aéreos que requerem uma alta velocidade de rotação.
- Motor redutor motores: estes são motores corrente contínua que adiciona um redutor interno para aumentar o torque do motor e reduza sua velocidade. Assim, eles são comumente usados para alimentar rodas de veículos e robôs , é por isso que eles são adequados para projetos de robótica Arduino.
- Motores de passo : São caracterizados por um eixo que é responsável por girar em um ângulo fixo denominado "não" quando isso é definido por um processador. Por este motivo, um motor rotativo desta classe tem necessariamente precisa de um processador para funcionar corretamente . Graças à sua capacidade, são amplamente utilizados na robótica. Na avaliação disso, existem motores unipolares e bipolares nesta classificação.
- Servo Motors : É sem dúvida o tipo de motor rotativo mais utilizado para construir projetos com o Arduino. Que basicamente fornece um sinal pulsado gerado por um processador que transmite a posição desejada para que de tal forma autônomo, o servo pode ser localizado na referida posição . Graças a isso, eles são usados em projetos de robótica (como: braços robóticos, robôs bípedes, hexápodes, etc.) e ainda permitem o posicionamento de sensores ou de um laser.
- Servomotores com rotação contínua : como o nome sugere, são motores que mostram a capacidade de fazer um círculo completo e, portanto, se comportam como um motor DC com controle de velocidade integrado . Portanto, eles se referem a uma variante de um servo motor clássico, apenas que a eletrônica é alterada para que o sinal controle a velocidade (e não a posição).
Agora, outro aspecto a considerar ao programar esses itens no Arduino, indica os requisitos necessários para considerar um motor rotativo prático .
Portanto, apresentamos aqui esses requisitos para que você possa verificá-los quando quiser adquirir um:
- Os selos de gás da câmara de trabalho devem ser confiáveis em três dimensões . Isso significa que o motor em questão deve ser formado a partir da conexão de juntas individuais de forma tridimensional.
- Cada parte móvel deve realizar um movimento de rotação, incluindo o mecanismo de temporização . É por isso que as estruturas que requerem válvulas e mecanismos de sucção e / ou exaustão com rotores oscilantes não são adequadas.
- Todas as peças de construção precisam de resistência à fadiga em altas revoluções e pressões . Isso significa que eles devem ter capacidade suficiente, em tamanho e forma, para suportar altas pressões, cargas térmicas e velocidades de deslizamento.
- Eles devem realizar uma troca gasosa relevante na sucção e na exaustão . É essencial que o motor tenha tempo suficiente para sucção e exaustão, especialmente em altas rotações e velocidades.
- Lubrificação e resfriamento suficientes devem ser fornecidos . O que requer alta durabilidade, altas cargas térmicas e altas velocidades de deslizamento. Para fazer isso, certifique-se de ter capacidade suficiente para suportar esses fatores.
Aprenda passo a passo a programar um motor rotativo no Arduino a partir do zero
Em primeiro lugar, as conexões dependerão do tipo de motor rotativo que você deseja usar com o Arduino. Levando isso em consideração, todos devem ter três filhos (um que irá aterrar, outro para a fonte de alimentação de 5 volts e um terceiro fio para um pino PWM). Assim, depois de feita a conexão, é possível iniciar o processo de programação de um motor rotativo no IDE Arduino em comece do nada, que, na hora de construir um determinado projeto, é o mais interessante de todos.
Nesse caso, as etapas a seguir são as seguintes:
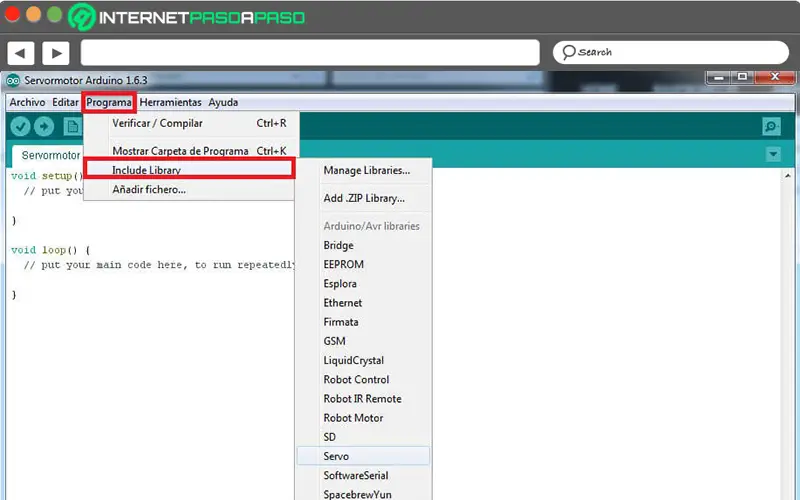
- Em primeiro lugar, você deve usar uma biblioteca externa para ajudá-lo a controlar o tipo de motor rotativo que você está usando. Para isso, proceda à incorporação da referida biblioteca no ambiente Arduino por meio da guia que diz "Programa" acima.
- Depois de selecionar esta guia, clique na opção que diz "Incluir biblioteca" e assim aparecerá um menu a partir do qual terá que escolher o motor utilizado (por exemplo, "Servo" ).
- Uma vez feito, você já terá feito um "incluir" em seu código de programação que permitirá que você controle o motor em questão. Além disso, você pode usar um código base (explicado mais tarde) para posicioná-lo em ângulos de 0 ° a 180 ° (ou seja, 0 °, 90 ° e 180 °).
- Basicamente, neste código, é útil declarar um objeto ou variável como usando a biblioteca "Servo.h" Por exemplo. Levando isso em consideração, esse processo admite dois métodos: (1) "anexar" para consertar o pino que você conectou ao seu servo. (2) "escrever" para indicar o ângulo onde o motor rotativo será posicionado.
- Desta forma, você será capaz de controle seu motor no Arduino de uma maneira muito fácil , graças ao uso da biblioteca "Servo.h" neste caso.
Aqui está o código simples para rodar o motor de 0º a 180º:
// Incluímos a biblioteca para poder controlar o servo
#incluir
// Declaramos a variável para controlar o servo
Servo servo motor;
void configuração () {
// Iniciamos o monitor serial para exibir o resultado
Serial.begin(9600);
// Iniciamos o servo para que comece a trabalhar com o pino 9
servomotor.attach(9);
}
void loop () {
// Vamos para a posição 0º
servoMotor.write(0);
// Esperamos 1 segundo
atraso (1000);
// Vamos para a posição 90 °
servoMotor.write(90);
// Esperamos 1 segundo
atraso (1000);
// Vamos para a posição 180 °
servoMotor.write(180);
// Esperamos 1 segundo
atraso (1000);
}
Lista dos melhores motores rotativos para trabalhar com Arduino que você deve conhecer
Embora, anteriormente, tenhamos delineado os principais tipos de motores rotativos que são adequados para trabalhar com cartas e programas Arduino através deste software; A verdade é que existem alguns modelos específicos desses motores que são ideal para projetos de construção de qualidade .
"ATUALIZAÇÃO ✅ Quer saber o que são os motores rotativos Arduino e como usá-los bem? ⭐ ENTRE AQUI ⭐ e aprenda tudo do zero! ”
Portanto, nesta seção do artigo, iremos detalhar alguns dos melhores motores rotativos para usar em conjunto com o Arduino:
Motores sem escova sem escova

Como o nome sugere, este são motores que funcionam sem escovas e graças a isso não geram atrito nas curvas; como resultado, seu desempenho é superior. Assim, eles são definidos como uma variante dos motores de corrente contínua que, a fim de fornecer sistema de retificação de corrente de alta qualidade , sem escovas e, em vez disso, usa eletrônicos para realizar a comutação de campo. magnético.
Portanto, as principais vantagens deste tipo de motor para Arduino são que eles tem uma faixa de alta velocidade , maior desempenho, maior vida útil da bateria, melhor energia com menos peso e tamanho, pouca perda de calor e um ruído eletrônico mínimo. . Eles também dissipam melhor o calor e requerem menos manutenção devido à falta de escovas . No entanto, também deve ser observado que eles são mais caros e mais complexos ou ainda só funcionam com baterias Lipo.
Servo Motors
Os servomotores são um outro dos atuadores mais comuns para projetos Arduino . Desde então, eles podem ser facilmente implementados para construir robôs e qualquer coisa relacionada ao ambiente robótico. Portanto, eles permitem que você crie braços robóticos, robôs bípedes e hexápodes , como vimos anteriormente. Eles ainda ajudam a posicionar lasers e sensores, além de poderem ser usados em torres. Em relação ao seu funcionamento, os servomotores recebem um sinal pulsado que é gerado por um processador .
Este é responsável por transmitir a posição desejada para que o servo se posicione neste ponto de forma autônomo . Para o qual, internamente, é composto por um motor DC montado em um redutor com um controlador . Então ele é caracterizado por oferecer uma faixa de giro de 180 ° porque não pode dar uma volta completa. Mas, em troca disso, ele oferece controle de posição total e rotação de alta precisão .
No entanto, também existem servo motores em rotação contínua nos quais basicamente os componentes eletrônicos são alterados para que o sinal pode controlar a velocidade em vez da posição . Graças a isso, eles podem fazer uma rotação completa e se comportar da mesma forma que os motores CC com controle de velocidade integrado. Mas, estes não permitem controle de velocidade preciso e para isso será necessário calibrar o servo e ajustar o sinal enviado, é claro.
Motores de passo 28BYJ-48

Embora isso seja verdade, os motores de passo são aqueles que têm um eixo que gira em um ângulo fixo chamado "pitch" , uma vez que é ajustado por um processador. Bem, mais especificamente, um motor de passo 28BYJ-48 se refere a um motor de passo que é menor e barato que motores convenções . Isso, com a particularidade de adicione um redutor interno de 1/64 .
Graças a isso, sua precisão geral é alta , uma vez que é inferior a 0,087 ° e um torque de 0,3 kg / cm. É por isso que é um elemento bastante útil para aplicações de precisão (como posicionar um robô articulado, direcionar um sensor ou laser e girar a plataforma de um scanner 3D). Além disso, eles têm a capacidade de operar a uma frequência máxima de 100 Hz e, portanto, eles oferecem uma velocidade máxima de 1 revolução a cada 40 segundos .
Motores DC

Como esses são os motores ou atuadores mais comuns de todos, eles não poderiam faltar nesta lista. Quel trabalho baseado em um alinhamento de dois campos magnéticos e, portanto, a parte fixa do motor (ou estator) possui um ímã permanente que produz um campo magnético em seu interior. Assim, seja qual for a velocidade e o torque exercido, o tempo é sempre perfeito .
Porém, fundamentalmente, tal sincronização se deve ao fato de que o mesmo ângulo de rotação do motor é aquele que estabelece a reversão da corrente . Além disso, é caracterizado por altas velocidades de rotação , embora seu controle não seja o mais preciso. Entre outras características, destacamos que os motores de corrente contínua fornecer controle de posição mínimo , eles dependem da carga que suportam e alguns deles incorporam um codificador interno.
Se você tiver alguma dúvida, deixe nos comentários, entraremos em contato o mais rápido possível e será uma grande ajuda para mais membros da comunidade também. Obrigado!