Moteurs rotatifs dans Arduino Que sont-ils, à quoi servent-ils et quels sont les meilleurs que nous pouvons utiliser dans un projet?

Arduino est aujourd’hui considéré comme l’ une des meilleures plates-formes de création électronique open source au monde. Lequel, offre à la fois des logiciels et du matériel gratuits, offre une grande puissance, est polyvalent et révèle une facilité d’utilisation remarquable. C’est donc l’un des éléments les plus fondamentaux pour le développement de projets basés sur la culture DIY et l’environnement maker .
De cette manière, cette plateforme permet aux créateurs et développeurs ainsi qu’aux amateurs de créer n’importe quel projet , quel que soit son niveau de difficulté et offre ainsi un fonctionnement optimal dans le but de mettre en œuvre une meilleure utilisation de la technologie et de l’Internet du des choses . Par conséquent, son expansion est disproportionnée.
Désormais, heureusement, les cartes Arduino prennent en charge une myriade de plugins avec lesquels il est possible de construire les différents projets souhaités . Raison pour laquelle, ils permettent l’utilisation de moteurs rotatifs ou rotatifs pour les programmer à partir de zéro. C’est pourquoi, ci-dessous, nous vous montrons en quoi consistent ces éléments et comment les utiliser en conjonction avec Arduino .
Qu’est-ce qu’un moteur rotatif et à quel type de projets Arduino sont-ils utilisés?
S’il est vrai, le moteur rotatif est considéré comme l’ un des premiers types de moteurs à combustion interne qui existaient . Par conséquent, il était largement utilisé avant la Première Guerre mondiale, dans les premières voitures et motos, ainsi que pour propulser les avions. Considérant que, en général, ils se distinguent en travaillant avec un vilebrequin qui reste fixe et donc, le moteur tourne autour de lui .
Or, fondamentalement, un moteur rotatif consiste en un moteur à combustion interne qui est capable d’effectuer les quatre temps d’aspiration, de compression, de détente et d’échappement , tandis que la chambre de travail modifie son volume et que les pièces mobiles tournent en la même direction.
Ainsi, en substance, il fonctionne comme un moteur à cycle Otto qui, au lieu d’avoir un bloc-cylindres avec un vilebrequin en rotation, reste fixe et tout le bloc-cylindres est celui qui tourne autour de lui . De leur côté, dans les projets Arduino, les moteurs rotatifs ont des usages différents qui, notamment, sont dédiés au domaine de la domotique pour automatiser une maison, comme dans le monde de l’électronique.
Eh bien, généralement, ces moteurs sont présents dans n’importe quelle partie d’une maison , car ils sont essentiels pour le fonctionnement des ventilateurs, des appareils électriques, des ordinateurs personnels, des rasoirs électriques, des voitures télécommandées, etc. Ils peuvent même être utilisés pour créer de grands projets où l’énergie électrique est le protagoniste .
Que dois-je garder à l’esprit lors de la programmation à l’aide de moteurs rotatifs sur Arduino?

Heureusement, l’ utilisation de moteurs rotatifs dans Arduino révèle des avantages notables que les utilisateurs devraient connaître. Nous mentionnons donc ici le plus important d’entre eux: ses composants sont équilibrés en interne avec des contrepoids rotatifs qui favorisent une distribution de puissance plus douce et ne génèrent pas beaucoup de vibrations.
De plus, il comporte moins de pièces mobiles qu’un moteur conventionnel et son poids total est donc beaucoup plus optimal. Pour sa part, pour compiler un moteur rotatif sur Arduino, il est indispensable de prendre en compte plusieurs aspects .
L’un d’eux comprend les types qui peuvent être utilisés dans un projet avec des cartes Arduino et, par conséquent, il vaut la peine de les détailler comme suit:
- Moteurs à courant continu : ils sont également appelés «moteurs à courant continu» et sont l’un des actionneurs les plus courants de tous. Qui fonctionnent sur la base de l’alignement de deux champs magnétiques et son principal avantage est qu’il garantit une synchronisation efficace, quelle que soit la vitesse.
- Moteurs sans balais : Ils désignent une variante de moteurs à courant continu qui diffère des balais en tant que système de redressement de courant. Par conséquent, ils se tournent vers l’électronique pour pouvoir commuter le champ magnétique. Ainsi, ils sont largement utilisés dans les ventilateurs, les hélices de navires, les quadricoptères et autres véhicules aériens qui nécessitent une vitesse de rotation élevée.
- Démultiplié moteur moteurs: Ce sont des moteurs à courant continu qui ajoutent un réducteur interne pour augmenter le couple du moteur et de réduire sa vitesse. Ainsi, ils sont couramment utilisés pour alimenter les roues de véhicules et de robots , c’est pourquoi ils conviennent aux projets de robotique Arduino.
- Moteurs pas à pas : Ils sont caractérisés par un arbre qui est responsable de la rotation à un angle fixe appelé «pas» lorsque celui-ci est réglé par un processeur. Pour cette raison, un moteur rotatif de cette classe a nécessairement besoin d’un processeur pour fonctionner correctement . Grâce à leur capacité, ils sont largement utilisés en robotique. En évaluant cela, il existe des moteurs unipolaires et bipolaires dans cette classification.
- Servomoteurs : C’est sans aucun doute le type de moteur rotatif le plus utilisé pour construire des projets avec Arduino. Qui, fondamentalement, fournit un signal pulsé généré par un processeur qui transmet la position souhaitée de sorte que, de manière autonome, le servo puisse être situé dans ladite position . Grâce à cela, ils sont utilisés dans des projets de robotique (tels que: bras robotiques, robots bipèdes, hexapodes, etc.) et permettent même le positionnement de capteurs ou d’un laser.
- Servomoteurs à rotation continue : comme leur nom l’indique, ce sont des moteurs qui montrent la capacité de faire un cercle complet et donc de se comporter comme un moteur à courant continu avec contrôle de vitesse intégré . Par conséquent, ils se réfèrent à une variante d’un servomoteur classique, seulement que l’électronique est modifiée pour que le signal commande la vitesse (et non la position).
Maintenant, un autre aspect à considérer lors de la programmation de ces éléments dans Arduino, indique les exigences nécessaires pour envisager un moteur rotatif pratique .
Par conséquent, nous présentons ici ces exigences afin que vous puissiez les vérifier lorsque vous souhaitez en acquérir une:
- Les joints d’étanchéité à gaz de la chambre de travail doivent être fiables en trois dimensions . Cela signifie que le moteur en question doit être constitué à partir de la connexion de joints individuels de manière tridimensionnelle.
- Chaque pièce mobile doit effectuer un mouvement de rotation comprenant le mécanisme de chronométrage . Raison pour laquelle les structures nécessitant des vannes et des mécanismes d’aspiration et / ou d’échappement utilisant des rotors à mouvement oscillatoire ne conviennent pas.
- Toutes les pièces constructives ont besoin d’une résistance à la fatigue à des révolutions et des pressions élevées . Cela signifie qu’ils doivent avoir une capacité suffisante, en taille et en forme, pour résister à des pressions élevées, des charges thermiques et des vitesses de glissement.
- Ils doivent effectuer un échange de gaz pertinent dans l’aspiration et dans l’échappement . Il est essentiel que le moteur laisse suffisamment de temps pour l’aspiration et l’échappement, en particulier lorsque les régimes et les vitesses sont élevés.
- Une lubrification et un refroidissement suffisants doivent être fournis . Ce qui nécessite une durabilité élevée, des charges thermiques élevées et des vitesses de glissement élevées. Pour ce faire, assurez-vous d’avoir une capacité suffisante pour résister à ces facteurs.
Apprenez étape par étape à programmer un moteur rotatif dans Arduino à partir de zéro
Tout d’abord, les connexions dépendront du type de moteur rotatif que vous souhaitez utiliser avec l’Arduino. En tenant compte de cela, tous doivent avoir trois fils (un qui ira à la terre, un autre pour l’alimentation 5 volts et un troisième fil pour une broche PWM). Ainsi, après avoir effectué la connexion, il est possible de démarrer le processus de programmation d’un moteur rotatif dans l’ IDE Arduino à partir de zéro, ce qui, lors de la construction d’un certain projet, est le plus intéressant de tous.
Dans ce cas, les étapes à suivre sont les suivantes:
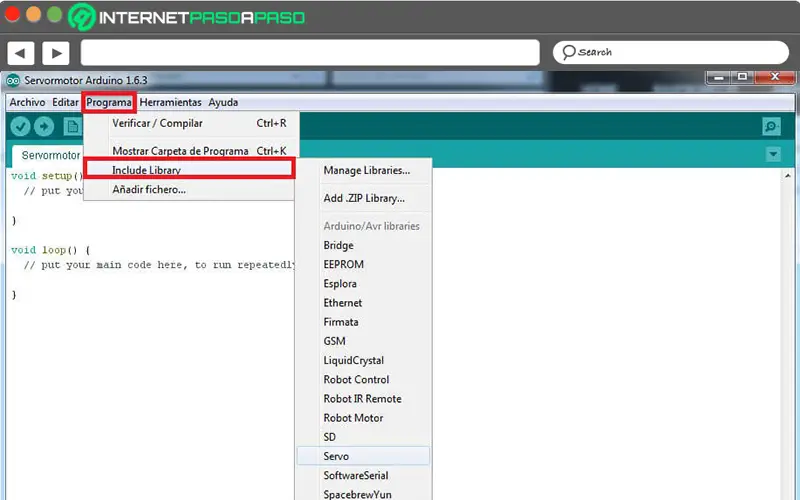
- Tout d’abord, vous devez utiliser une bibliothèque externe pour vous aider à contrôler le type de moteur rotatif que vous utilisez. Pour ce faire, procédez à l’incorporation de ladite bibliothèque dans l’environnement Arduino via l’onglet qui dit «Programme» en haut.
- Une fois que vous sélectionnez cet onglet, cliquez sur l’option qui indique «Inclure la bibliothèque» et ainsi, un menu s’affichera à partir duquel vous devrez choisir le moteur utilisé (par exemple, «Servo» ).
- Une fois cela fait, vous aurez déjà fait un «include» dans votre code de programmation qui vous permettra de contrôler le moteur en question. De plus, vous pouvez utiliser un code de base (expliqué plus loin) pour le positionner à des angles de 0 ° à 180 ° (soit: 0 °, 90 ° et 180 °).
- Fondamentalement, dans ce code, il est utile de déclarer un objet ou une variable en utilisant la bibliothèque «Servo.h» , par exemple. En tenant compte de cela, ce processus admet deux méthodes: (1) «attacher» pour fixer la broche que vous avez connectée à votre servo. (2) «écrire» pour indiquer l’angle où le moteur rotatif sera positionné.
- De cette façon, vous pourrez contrôler votre moteur dans Arduino d’une manière très simple , grâce à l’utilisation de la bibliothèque «Servo.h» dans ce cas.
Voici le code simple pour faire tourner le moteur de 0º à 180º:
// Nous incluons la librairie pour pouvoir contrôler le servo
#include <Servo.h>
// On déclare la variable pour contrôler le servo
Servomoteur servo;
void setup () {
// Nous démarrons le moniteur série pour afficher le résultat
Serial.begin (9600);
// Nous démarrons le servo pour qu'il commence à fonctionner avec la broche 9
servoMotor.attach (9);
}
boucle void () {
// On passe à la position 0º
servoMotor.write (0);
// On attend 1 seconde
retard (1000);
// Nous passons à la position 90 °
servoMotor.write (90);
// On attend 1 seconde
retard (1000);
// Nous passons à la position 180 °
servoMotor.write (180);
// On attend 1 seconde
retard (1000);
}
Liste des meilleurs moteurs rotatifs pour travailler avec Arduino que vous devriez connaître
Bien que, précédemment, nous ayons souligné les principaux types de moteurs rotatifs qui conviennent pour fonctionner avec des cartes et des programmes Arduino via ce logiciel; La vérité est qu’il existe certains modèles spécifiques de ces moteurs qui sont optimaux pour la construction de projets de qualité .
«MISE À JOUR ✅ Voulez-vous savoir ce que sont les moteurs rotatifs Arduino et comment bien les utiliser? ⭐ ENTREZ ICI ⭐ et apprenez tout à partir de zéro!»
Par conséquent, dans cette section de l’article, nous détaillerons certains des meilleurs moteurs rotatifs à utiliser en conjonction avec Arduino:
Moteurs brushless sans balais

Comme leur nom l’indique, ce sont des moteurs qui fonctionnent sans balais et grâce à cela, ils ne génèrent aucun frottement lors des virages; en conséquence, ses performances sont plus élevées. Ainsi, ils sont définis comme une variante de moteurs à courant continu qui, afin de fournir un système de redressement de courant de haute qualité , se passe de balais et utilise à la place l’électronique pour effectuer la commutation de champ. magnétique.
Ainsi, les principaux avantages de ce type de moteur pour Arduino sont qu’ils présentent une plage de vitesse élevée , des performances plus élevées, une durée de vie de la batterie plus longue, une meilleure puissance avec moins de poids et de taille, peu de perte de chaleur et un minimum de bruit électronique. . Ils dissipent également mieux la chaleur et nécessitent moins d’entretien en raison du manque de brosses . Cependant, il convient également de noter qu’ils sont plus chers et plus complexes , voire ne fonctionnent qu’avec des batteries Lipo.
Moteurs servo
Les servomoteurs sont un autre des actionneurs les plus courants pour les projets Arduino . Depuis, ceux-ci peuvent être facilement mis en œuvre pour construire des robots et tout ce qui a à voir avec l’environnement robotique. Par conséquent, ils vous permettent de créer des bras robotiques, des robots bipèdes et des hexapodes , comme nous l’avons vu précédemment. Ils aident même à positionner les lasers et les capteurs, outre le fait qu’ils peuvent être utilisés dans des tourelles. Concernant leur fonctionnement, les servomoteurs reçoivent un signal pulsé qui est généré par un processeur .
Ce qui se charge de transmettre la position souhaitée pour que le servo puisse se localiser à ce point de manière autonome . Pour lequel, en interne, il est composé d’un moteur à courant continu assemblé à un réducteur avec un contrôleur . Ainsi, il se caractérise en offrant une plage de braquage de 180 ° , car il ne peut effectuer un virage complet. Mais, en échange de cela, il offre un contrôle total en position et une rotation de haute précision .
Cependant, il existe également des servomoteurs à rotation continue dans lesquels, fondamentalement, l’électronique est modifiée afin que le signal puisse contrôler la vitesse au lieu de la position . Grâce à cela, ils peuvent faire un tour complet et se comporter de la même manière que les moteurs à courant continu avec un contrôle de vitesse intégré. Mais, ceux-ci ne permettent pas un contrôle précis de la vitesse de rotation et pour cela, il faudra calibrer le servo et régler le signal envoyé, forcément.
Moteurs pas à pas 28BYJ-48

Bien que ce soit vrai, les moteurs pas à pas sont ceux qui ont un arbre qui tourne à un angle fixe appelé «pas» , une fois que celui-ci est ajusté par un processeur. Eh bien, plus précisément, un moteur pas à pas 28BYJ-48 fait référence à un moteur pas à pas qui est plus petit et moins cher que les moteurs conventionnels . Ceci, avec la particularité d’ ajouter un réducteur 1/64 interne .
Grâce à cela, sa précision globale est élevée , puisqu’elle est inférieure à 0,087 ° et un couple de 0,3 kg / cm. C’est pourquoi c’est un élément assez utile pour les applications de précision (comme par exemple le positionnement d’un robot articulé, la direction d’un capteur ou d’un laser et la rotation de la plate-forme d’un scanner 3D). En dehors de cela, ils ont la capacité de fonctionner à une fréquence maximale de 100 Hz et de ce fait, ils offrent une vitesse maximale de 1 tour toutes les 40 secondes .
Moteurs à courant continu

Comme ce sont les moteurs ou actionneurs les plus courants de tous, ils ne pouvaient pas manquer dans cette liste. Quel travail basé sur un alignement de deux champs magnétiques et, par conséquent, la partie fixe du moteur (ou du stator) possède un aimant permanent qui produit un champ magnétique à l’intérieur. Ainsi, quels que soient la vitesse et le couple exercés, le calage est toujours parfait .
Or, fondamentalement, ladite synchronisation est due au fait que le même angle de rotation du moteur est celui qui établit l’inversion du courant . En plus de cela, il se caractérise par des vitesses de rotation élevées , bien que son contrôle ne soit pas des plus précis. Entre autres caractéristiques, nous soulignons que les moteurs à courant continu offrent un contrôle de position minimal , ils dépendent de la charge qu’ils supportent et certains d’entre eux intègrent un encodeur interne.
Si vous avez des questions, laissez-les dans les commentaires, nous vous répondrons dans les plus brefs délais, et cela sera également d’une grande aide pour plus de membres de la communauté. Je vous remercie!



